





![]()

zprávy
zdroje zpráv:Nabídka práce v Přelouči
30.3.2019 8:05 Katedra geoinformatiky UP OlomoucPořizování územních plánů – Městský úřad Přelouč Úřad územního plánování Městského úřadu Přelouč nabízí volné pracovní místo (na dobu neurčitou) pro VŠ stavaře nebo architekta na pozici pořizovatele územních plánů a územně analytických podkladů obce s rozšířenou působností. Předpokladem je vysokoškolské vzdělání v oboru územní plánování, urbanismus, architektura, geografie, geoinformatika, krajinné inženýrství, se stavebním nebo […]
The post Nabídka práce v Přelouči appeared first on Katedra geoinformatiky.
New Wave 2019, tentokrát v Brně
30.3.2019 7:00 Česká asociace pro geoinformaceGeografický ústav PřF MU, EGEA a Česká geografická společnost letos v Brně ve dnech 12. a 13. září spolupořádají doktorandskou konferenci New Wave. Pořadatelé uvítají příspěvky různých autorů nejen z geografie, ale i z jiných věd spojených s prostorem. Konference tradičně probíhá v anglickém jazyce a registrace je zdarma.
Veškeré další informace naleznete
Aliance pro bezpilotní letecký průmysl je partnerem Commercial UAV Expo v Amsterdamu
29.3.2019 21:24 UpVision Aliance pro bezpilotní letecký průmysl je partnerem Commercial UAV Expo v Amsterdamu a nabízí zvýhodněné vstupenky a současně je partnerem mezinárodní Drone Hero soutěže.Více zde:
https://uavaliance.cz/spoluprace/commercial-uav-expo-amsterdam/
Přistávací plošina mise ExoMars dorazila do Evropy
29.3.2019 20:37 Český Kosmický PortálPlošina určená pro přistání na Marsu, kterou je kritickou součástí příští mise ExoMars, dorazila do Evropy pro závěrečnou montáž a zkoušky. A navíc získala nové jméno.
Orbit GT to present and exhibit at Geospatial World Forum, Amsterdam
29.3.2019 20:05 GISCafe.com Webcasts-Webinars Lokeren, Belgium, March 29th, 2019Orbit GT will be exhibiting and hosting a presentation at the Geospatial World Forum, Amsterdam, The Netherlands, …
Chinese Contractors Take Technological Plunge For Island-Hopping Roadway
29.3.2019 14:17 Bentley SystemsPress Coverage
ENR, USA
Read the articleBentley Systems to Showcase Infrastructure Engineering Digital Twin
29.3.2019 14:10 Bentley SystemsPress Coverage
Lidar News, USA
Read the articleAESA recognised for pioneering efforts to make EGNSS use in drones a reality
29.3.2019 13:42 European GNSS Agency
AESA (Agencia Estatal de Seguridad Aérea/ State Agency for Aviation Security) has taken on board the use of EGNOS and Galileo in drones.
The Spanish civil aviation authority has pushed for the use of EGNOS in drone operations at national level. The new Spanish regulation on drone operations (Real Decreto 1036/2017) describes the systems and measures that operators need to put in place to ensure safety. AESA, in their position as a regulatory supervisor, has published guidance material that explains the requirements to be met by these systems. In particular, the regulation proposes EGNOS as a suitable sensor to enable the pilot to know the position of the drone during the flight, also in operations with medium and high risk and including flights beyond visual line of sight (BVLOS).
National level experience for the benefit of Europe
Notably, all of these documents are produced in both English and Spanish, and as one of the only Member States to make all of the documentation public and in English, the Spanish authorities and AESA are ensuring the accessibility of these national advances. “By making this documentation public, and in English, we hope that our national advances towards the use of Galileo and EGNOS can serve as an inspiration to other Member States,” said Juan Jose Sola from AESA.
Building on this experience, the newly created group EUROCAE WG-105 SG-62 "GNSS for UAS" is developing guidelines to use GNSS for Unmanned Aerial Systems to ensure safe operations. The group is chaired by the H2020 GAUSS project, funded by GSA and coordinated by Everis Aeroespacial y Defensa.
Read this: Getting ready for the evolution of EGNOS
It is the first time that AESA has been recognised for such an award and demonstrates that work towards the use of Galileo and EGNOS in drones should continue and grow. The European GNSS Agency (GSA) is currently working to expand upon this work and is collaborating with EUROCAE (The European Organisation for Civil Aviation Equipment) to develop the guidelines for using GNSS to meet SORA (Specific Operations Risk Assessment) requirements.
About AESA
AESA is the Spanish state body that ensures the observation and implementation of civil aviation standards. The body works across different segments and competencies in the aviation sphere, including Air Transport, Aviation Safety, Air Navigation and Airport Security.
And this: GSA, SDM sign MoU on EGNSS support for Air Traffic Management
About SORA
Specific Operation Risk Assessment (SORA) exists to perform multi-stage risk analysis of certain unmanned aircraft operations. The SORA requirements also help to define mitigations and robustness levels. For more information read the SORA paper from JARUS (Joint Authorities for Rulemaking on Unmanned Systems).
Media note: This feature can be republished without charge provided the European GNSS Agency (GSA) is acknowledged as the source at the top or the bottom of the story. You must request permission before you use any of the photographs on the site. If you republish, we would be grateful if you could link back to the GSA website (http://www.gsa.europa.eu).
AESA recognised for pioneering efforts to make EGNSS use in drones a reality
29.3.2019 13:42 European GNSS AgencyAESA (Agencia Estatal de Seguridad Aérea/ State Agency for Aviation Security) has taken on board the use of EGNOS and Galileo in drones.
The Spanish civil aviation authority has pushed for the use of EGNOS in drone operations at national level. The new Spanish regulation on drone operations (Real Decreto 1036/2017) describes the systems that drones measure and systems that operators need to put in place in order to ensure safety of the operations. AESA, in their position as a regulatory supervisor, has published guidance material that explains the requirements to be met by these systems. In particular, the regulation proposes EGNOS as a suitable sensor to enable the pilot to know the position of the drone during the flight, also in operations with medium and high risk and including flights beyond visual line of sight (BVLOS).
National level experience for the benefit of Europe
Notably, all of these documents are produced in both English and Spanish, and as one of the only Member States to make all of the documentation public and in English, the Spanish authorities and AESA are ensuring the accessibility of these national advances. “By making this documentation public, and in English, we hope that our national advances towards the use of Galileo and EGNOS can serve as an inspiration to other Member States,” said Juan Jose Sola from AESA.
Building on this experience, the newly created group EUROCAE WG-105 SG-62 "GNSS for UAS" is developing guidelines to use GNSS for Unmanned Aerial Systems to ensure safe operations. The group is chaired by the H2020 GAUSS project, funded by GSA and coordinated by Everis Aeroespacial y Defensa.
Read this: Getting ready for the evolution of EGNOS
It is the first time that AESA has been recognised for such an award and demonstrates that work towards the use of Galileo and EGNOS in drones should continue and grow. The European GNSS Agency (GSA) is currently working to expand upon this work and is collaborating with EUROCAE (The European Organisation for Civil Aviation Equipment) to develop the guidelines for using GNSS to meet SORA (Specific Operations Risk Assessment) requirements.
About AESA
AESA is the Spanish state body that ensures the observation and implementation of civil aviation standards. The body works across different segments and competencies in the aviation sphere, including Air Transport, Aviation Safety, Air Navigation and Airport Security.
And this: GSA, SDM sign MoU on EGNSS support for Air Traffic Management
About SORA
Specific Operation Risk Assessment (SORA) exists to perform multi-stage risk analysis of certain unmanned aircraft operations. The SORA requirements also help to define mitigations and robustness levels. For more information read the SORA paper from JARUS (Joint Authorities for Rulemaking on Unmanned Systems).
Media note: This feature can be republished without charge provided the European GNSS Agency (GSA) is acknowledged as the source at the top or the bottom of the story. You must request permission before you use any of the photographs on the site. If you republish, we would be grateful if you could link back to the GSA website (http://www.gsa.europa.eu).
Nabídka práce (brigády) pro společnost ENVIPARTNER
29.3.2019 12:15 Společnosti ENVIPARTNER, s.r.o. nabízí dvě pracovní příležitosti pro studenty. Jedná se o pozici GIS specialista a Zpracovatel pasportů. Více na níže uvedných přílohách.Earth from Space
29.3.2019 10:05 ESA Observing the Earth
In this edition, we take a look at the narrow strait that connects eastern Europe to western Asia: the Bosphorus in northwest Turkey
The Bosphorus
29.3.2019 10:05 ESA Observing the Earth
Earth observation image of the week: Copernicus Sentinel-1 takes us over the narrow strait that separates Europe and Asia
Úspěch našich studentů na soutěži GISáček 2019 [Katedra aplikované geoinformatiky a kartografie, byTopic]
29.3.2019 8:50 Katedra aplikované geoinformatiky a kartografie Přf UK Dne 20. března 2019 se konala tradiční studentská soutěžní konference GISáček, které se zúčastnili studenti z oblasti geověd. Letošní ročník ovládli studenti prezentující své bakalářské práce obhájené na katedře aplikované geoinformatiky a kartografie. Bc. Jakub Marek, Bc. Faraz Ahmed Bashir, Bc. David Maceška a Bc. David Černický.Aktualizace: Vladimir Agafonkin, tvůrce legendárního frameworku Leaflet.js v Praze a Brně (pozvánka)
29.3.2019 8:39 GISportal.cz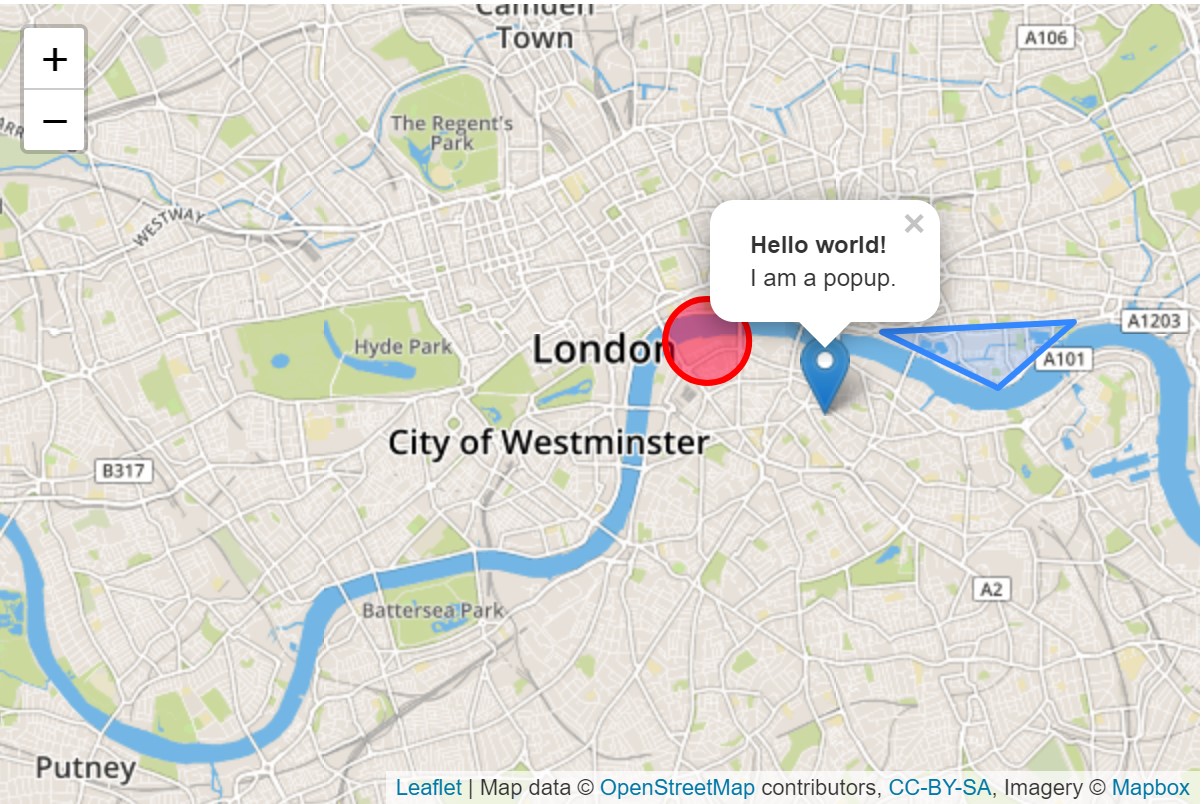
Brněnský start-up Kiwi.com, který je známý především svým vyhledávačem levných letenek, zve na dvě přednášky Vladimira Agafonkina ze společnosti Mapbox, tvůrce legendárního frameworku Leaflet.js a Pavla Zbytovského. Třetím přednášejícím bude Jan Havlíček ze společnosti Mapy.cz. Přednášky s názvem Modern map frameworks for web and mobile budou probíhat v Praze a Brně 8. a 9. dubna vždy od 18:30 a jsou […]
The post Aktualizace: Vladimir Agafonkin, tvůrce legendárního frameworku Leaflet.js v Praze a Brně (pozvánka) appeared first on GISportal.cz.
Vladimir Agafonkin, tvůrce legendárního frameworku Leaflet.js v Praze a Brně (pozvánka)
29.3.2019 8:39 GISportal.czBrněnský start-up Kiwi.com, který je známý především svým vyhledávačem levných letenek, zve na dvě přednášky Vladimirs Agafonkina ze společnosti Mapbox, tvůrce legendárního frameworku Leaflet.js a Pavela Zbytkovského. Přednášky s názvem Modern map frameworks for web and mobile budou probíhat v Praze a Brně 8. a 9. dubna vždy od 18:30 a jsou zdarma. Využijte této jedinečné příležitosti poslechnout si významnou […]
The post Vladimir Agafonkin, tvůrce legendárního frameworku Leaflet.js v Praze a Brně (pozvánka) appeared first on GISportal.cz.
Vladimir Agafonkin, tvůrce legendárního frameworku Leaflet.js v Praze a Brně (pozvánka)
29.3.2019 8:39 GISportal.czBrněnský start-up Kiwi.com, který je známý především svým vyhledávačem levných letenek, zve na dvě přednášky Vladimira Agafonkina ze společnosti Mapbox, tvůrce legendárního frameworku Leaflet.js a Pavla Zbytkovského. Přednášky s názvem Modern map frameworks for web and mobile budou probíhat v Praze a Brně 8. a 9. dubna vždy od 18:30 a jsou zdarma. Využijte této jedinečné příležitosti poslechnout si významnou […]
The post Vladimir Agafonkin, tvůrce legendárního frameworku Leaflet.js v Praze a Brně (pozvánka) appeared first on GISportal.cz.
Aktualizace: Vladimir Agafonkin, tvůrce legendárního frameworku Leaflet.js v Praze a Brně (pozvánka)
29.3.2019 8:39 GISportal.czBrněnský start-up Kiwi.com, který je známý především svým vyhledávačem levných letenek, zve na dvě přednášky Vladimira Agafonkina ze společnosti Mapbox, tvůrce legendárního frameworku Leaflet.js a Pavla Zbytkovského. Třetím přednášejícím bude Jan Havlíček ze společnosti Mapy.cz. Přednášky s názvem Modern map frameworks for web and mobile budou probíhat v Praze a Brně 8. a 9. dubna vždy od 18:30 a jsou […]
The post Aktualizace: Vladimir Agafonkin, tvůrce legendárního frameworku Leaflet.js v Praze a Brně (pozvánka) appeared first on GISportal.cz.
Concept3D Platform Launched by Louisiana State University for Immersive Campus Map
29.3.2019 8:00 GISCafe.com Webcasts-Webinars Platform Creates Mobile-Friendly Digital Campus Experience; Features Campus Points of Interest Tour, Wayfinding and MoreMarch 27, 2019 …
UrtheCast To Host Fourth Quarter 2018 Conference Call on April 2, 2019
29.3.2019 8:00 GISCafe.com Webcasts-Webinars VANCOUVER, March 28, 2019 — (PRNewswire) — UrtheCast Corp. (TSX:UR) ("UrtheCast" or the "Company") announced today that the …CoreLogic to Announce First Quarter 2019 Financial Results
29.3.2019 8:00 GISCafe.com Webcasts-Webinars IRVINE, Calif. — (BUSINESS WIRE) — March 28, 2019 — CoreLogic® (NYSE: CLGX), a leading global provider of property information, …Provoz služby WSDP 2.7 prodloužen do 30. dubna 2019
29.3.2019 7:36 GEPROČÚZK plánoval ukončit provoz webových služeb dálkového přístupu verze 2.7 (WSDP) ke dni 31.3.2019.… >>
Ocenění pro studenta Geografického ústavu Tomáše Bernáta
29.3.2019 0:00 Geografický ústav MUDne 20. března 2019 se na VŠB v Ostravě uskutečnila soutěžní konference Gisáček 2019, která je otevřená pro všechny studenty bakalářských a magisterských programů všech vysokých škol v České a Slovenské republice a Polsku, kteří zpracovávali v rámci svých semestrálních, bakalářských a diplomových prací témata z oblasti geoinformatiky a geoinformačních technologií včetně jejich aplikací.
Vítězem magisterské sekce se stal student Geografického ústavu oboru Geografická kartografie a geoinformatika Bc. Tomáš Bernát, který prezentoval svou práci na téma Návrh databáze a analytických nástrojů pro kritické body v terénu.
Více informací naleznete na webu https://gisportal.cz/gisacek-2019-vysledky/.
CEDA se přejmenovává a zároveň se stěhuje
28.3.2019 23:28 GeoBusiness Společnost Central European Data Agency, a.s. (CEDA) mění k 1. dubnu 2019 oficiální název a sídlo. Od pondělí 1. dubna společnost najdete jako CEDA ... PřečístBonjour and Hola from Microdrones.com
28.3.2019 19:53 GISCafe.com Webcasts-Webinars ROME, N.Y., March 27, 2019 (GLOBE NEWSWIRE) -- The French and Spanish version of microdrones.com is now online. Simply visit microdrones.com and …TomTom Launches State-of-the-Art Satnav
28.3.2019 19:53 GISCafe.com Webcasts-Webinars Company celebrates 100 million navigation products sold with launchof TomTom GO Premium
AMSTERDAM — (BUSINESS WIRE) — …
Velodyne Achieves Half a Billion Dollars in Lidar Sensors Shipped
28.3.2019 19:53 GISCafe.com Webcasts-Webinars Velodyne is the Lidar Industry Leader in Mass ProductionSAN JOSE, Calif. — (BUSINESS WIRE) — March 28, 2019 —
…
Maxar Selected to Provide its NaturalVue® 2.0 Image Mosaic and Urban Change Indicator Products to Esri
28.3.2019 19:53 GISCafe.com Webcasts-Webinars WESTMINSTER, CO, March 28, 2019 — (PRNewswire) —WESTMINSTER, CO, March 28, 2019 /PRNewswire/ - Maxar Technologies (NYSE:MAXR) …
#GeospatialByDefault movement gaining momentum; Join GWF 2019 in Amsterdam
28.3.2019 19:53 GISCafe.com Webcasts-Webinars Geospatial World Forum 2019 is set to be the most talked about geospatial event of the year with 1,000+ delegates, 200+ CEOs and senior government …Esri Launches R&D Center in New Delhi, India
28.3.2019 19:53 GISCafe.com Webcasts-Webinars New Location to Focus on Advancing Data Science, Deep Learning, andArtificial Intelligence
REDLANDS, Calif. — (BUSINESS WIRE) …
Autodesk Reaffirms First Quarter And Fiscal Year 2020 Outlook At Annual Investor Day
28.3.2019 19:53 GISCafe.com Webcasts-Webinars SAN RAFAEL, Calif., March 28, 2019 — (PRNewswire) — Autodesk, Inc. (NASDAQ: ADSK) reaffirmed its business outlook for the …DJI Introduces DJI Terra To Capture, Visualize And Analyze Drone Data
28.3.2019 19:53 GISCafe.com Webcasts-Webinars 3D Modeling And Mapping Software Transforms Drone Data Into Digital Assets For Easy Analysis And Decision MakingSHENZHEN, China, March 28, 2019 …
ESA a NASA se spojují v oblasti průzkumu Měsíce
28.3.2019 19:53 Český Kosmický PortálŘeditel pilotovaného a robotického průzkumu v ESA David Parker a přidružený administrátor ředitelství vědeckých misí NASA Thomas Zurbuchen podepsali prohlášení o záměru koordinovat vědeckých průzkum Měsíce a identifikaci možných příležitostí spolupráce při lunárních misích.
New P3D Features I Like – And, You Might, Too!
28.3.2019 16:51 Carlson Software You can have all the RGB or LiDAR point clouds you want, but if you can’t quickly and easily generate a quality surface with smooth contours, there’s no chance of creating deliverables you are proud of, or running good hydrology calculations, or anything else you might need for a surface. I come at this not […]Společnost CEDA se stěhuje!
28.3.2019 14:55 CEDA Maps a.s. Praha, 28. března 2019 - Společnost Central European Data Agency, a.s. mění k 1.4.2019 oficiální název a sídlo. Od pondělí 1.4.2019 nás najdete jako CEDA Maps na nové adrese v Jihlavské 1558/21 v Praze 4 - Michli.20190328 Rada/odborný rada oddělení aktualizace a dokumentace katastru nemovitostí
28.3.2019 14:16 ČÚZK /Urady/Katastralni-urady/Katastralni-urady/Katastralni-urad-pro-Stredocesky-kraj/Katastralni-pracoviste/KP-Nymburk/O-uradu/Aktuality/20161013Rada-odborny-rada-–-informatik-(2)20190328 Rada/odborný rada oddělení aktualizace a dokumentace katastru nemovitostí
28.3.2019 14:16 ČÚZK - předpisy a opatření Katastrální úřad pro Středočeský kraj - Katastrální pracoviště Nymburk Vyhlášení výběrového řízení: Rada/odborný rada oddělení aktualizace a dokumentace katastru nemovitostí V části "Úřední deska", v sekci "Oznámení a jiná úřední sdělení" bylo vystaveno "Oznámení o vyhlášení výběrového řízení na obsazení služebního místa Rada/odborný rada oddělení aktualizace a dokumentace katastru nemovitostí "Rada/odborný rada oddělení aktualizace a dokumentace katastru nemovitostí
28.3.2019 14:15 ČÚZK - volná místa Katastrální úřad pro Středočeský kraj - Katastrální pracoviště Nymburk vypisuje výběrové řízení na místo Rada/odborný rada oddělení aktualizace a dokumentace katastru nemovitostíRada/odborný rada oddělení aktualizace a dokumentace katastru nemovitostí
28.3.2019 14:15 ČÚZK /Urady/Katastralni-urady/Katastralni-urady/Katastralni-urad-pro-Stredocesky-kraj/Uredni-deska/Oznameni-a-jina-uredni-sdeleni/Volna-mista/Rada-odborny-rada-oddeleni-aktualizace-a-dokumentaRada/odborný rada oddělení aktualizace a dokumentace katastru nemovitostí
28.3.2019 14:15 ČÚZK - předpisy a opatření Katastrální úřad pro Středočeský kraj - Katastrální pracoviště Nymburkvypisuje výběrové řízení na místo Rada/odborný rada oddělení aktualizace a dokumentace katastru nemovitostí
Rada/odborný rada oddělení aktualizace a dokumentace katastru nemovitostí
20190328 Vrchní referent/rada oddělení aktualizace a dokumentace katastru nemovitostí
28.3.2019 14:07 ČÚZK /Urady/Katastralni-urady/Katastralni-urady/Katastralni-urad-pro-Stredocesky-kraj/Katastralni-pracoviste/KP-Nymburk/O-uradu/Aktuality/20161013Rada-odborny-rada-–-informatik-(1)20190328 Vrchní referent/rada oddělení aktualizace a dokumentace katastru nemovitostí
28.3.2019 14:07 ČÚZK - předpisy a opatření Katastrální úřad pro Středočeský kraj - Katastrální pracoviště Nymburk Vyhlášení výběrového řízení: Vrchní referent/rada oddělení aktualizace a dokumentace katastru nemovitostí V části "Úřední deska", v sekci "Oznámení a jiná úřední sdělení" bylo vystaveno "Oznámení o vyhlášení výběrového řízení na obsazení služebního místa Vrchní referent/rada oddělení aktualizace a dokumentace katastru nemovitostí "AECOM Accelerates Digital Advancement with Real-time Insights into Project Performance and Trends
28.3.2019 14:03 Bentley SystemsPress Coverage
APN News, USA
Read the articleARC forum shows culture aids digitalization
28.3.2019 13:58 Bentley SystemsPress Coverage
Control Global, USA
Read the articleRada / odborný rada – rozhodování o povolení vkladu v oddělení právních vztahů k nemovitostem
28.3.2019 13:57 ČÚZK - volná místa Katastrální úřad pro Zlínský kraj - Katastrální pracoviště Valašské Meziříčí vypisuje výběrové řízení na místo Rada / odborný rada – rozhodování o povolení vkladu v oddělení právních vztahů k nemovitostemRada / odborný rada – rozhodování o povolení vkladu v oddělení právních vztahů k nemovitostem
28.3.2019 13:57 ČÚZK - předpisy a opatření Katastrální úřad pro Zlínský kraj - Katastrální pracoviště Valašské Meziříčívypisuje výběrové řízení na místo
Rada / odborný rada – rozhodování o povolení vkladu v oddělení právních vztahů k nemovitostem
Industrializing Project Delivery Using BIM Methodologies and a CDE for Digital Cities in Kunming City, Bentley Systems
28.3.2019 13:51 Bentley SystemsPress Coverage
AECCafe, USA
Read the articleIn Brief: Bentley Wins BIM Show Live 2019 Award-BIM Enabler/Consultant of the Year
28.3.2019 13:16 Bentley SystemsPress Coverage
Architosh, USA
Read the articleWhat is BIM and why should engineering students know about it?
28.3.2019 13:07 Bentley SystemsPress Coverage
Study International, UK
Read the articleBlue Marble Hosting its First Free Online Geo-Conference GeoTalks on March 21
28.3.2019 12:43 GISCafe.com Webcasts-Webinars Hallowell, Maine – March 20, 2019 - Blue Marble Geographics (bluemarblegeo.com) is hosting the first Blue Marble GeoTalks, an online …AEC Next and SPAR 3D 2019 Conference Program Announced
28.3.2019 10:08 GISCafe.com Webcasts-Webinars Line-up of 100 conference speakers announced including new keynotes from National Geographic and IBMMarch 28, 2019 (Anaheim, California, USA) …
Elektronický meteorologický slovník
28.3.2019 7:37 GISportal.cz
Víte co je humilis nebo haboob? Pokud ne, můžete se podívat do nového elektronického meteorologického slovníku. Ten obsahuje výklad téměř 4500 českých odborných termínů z oblasti meteorologie, klimatologie a příbuzných oborů, vysvětluje více než 300 zkratek a umožňuje vyhledávání českých ekvivalentů termínů v angličtině, slovenštině, němčině, francouzštině a ruštině. Elektronický meteorologický slovník výkladový a terminologický (eMS) je výsledkem mnohaleté práce terminologické skupiny České meteorologické společnosti […]
The post Elektronický meteorologický slovník appeared first on GISportal.cz.
Státní mapa 1:5 000-odvozená se sítí systému S-1952 v rámu
28.3.2019 1:00 Cenia - Katalog metadat ČR - INSPIRE : Druhé doplněné vydání Státní mapy 1 : 5 000 - odvozené mělo v rámu vyznačenu síť rovinných souřadnic Gauss-Krügerova zobrazení v systému S-1952, který byl utajován, proto jsou tyto mapové listy v ÚAZK řazeny v samostatném souboru. Mapový rám obsahuje rysky rovinné souřadnicové sítě Křovákova zobrazení v půlkilometrovém intervalu, rysky rovinné souřadnicové sítě třístupňových pásů v systému S-1952 v půlkilometrovém intervalu, rysky zeměpisné sítě a jejich popis.USC Spatial Sciences Institute Announces Master of Science in Spatial Economics and Data Analysis
27.3.2019 21:22 GISCafe.com Webcasts-Webinars March 27, 2019 -- John P. Wilson, Professor and Founding Director of the Spatial Sciences Institute (SSI) at the …Geospatial World Leadership Awards announced, to be given away at GWF 2019
27.3.2019 18:03 GISCafe.com Webcasts-Webinars March 26, 2019: Geospatial Media and Communications has announced the winners of the 2019 Geospatial World Leadership award, which is meant to …CourthouseUSA Now Offers Access to Statewide Commercial Property Data in Oklahoma via ValueArmor
27.3.2019 18:03 GISCafe.com Webcasts-Webinars March 27, 2019 -- CourthouseUSA, in partnership with Property Records Preservation LLC, announces ValueArmor Standard Edition for the state of …Kespry Announces Mining, Aggregates, Insurance, and Inspection Enterprise Growth, and New Strategic Funding to Enhance AI-Augmented Aerial Intelligence Platform
27.3.2019 18:02 GISCafe.com Webcasts-Webinars Salesforce Ventures invests in Kespry to enhance end-to-end digital experience for insurance clients and their customersMENLO PARK, Calif., March …
Big Data and Artificial Intelligence to Enhance Homeland Security & Public Safety Technologies
27.3.2019 18:02 GISCafe.com Webcasts-Webinars WASHINGTON, March 27, 2019 — (PRNewswire) — According to a new market research report Global Homeland Security & Public Safety …IMGING Becomes First Drone Platform With On-Site Roof Measurements, Adds AI Damage Detection for Commercial Roofs
27.3.2019 18:02 GISCafe.com Webcasts-Webinars New IMGING app updates bring innovative possibilities for claims adjusting and roofingPLEASANT GROVE, Utah, March 27, 2019 — (PRNewswire) …
QGIS 3.6 – nová verze dostupná ke stažení
27.3.2019 15:08 GISportal.cz
Další verze populárního open-source GIS softwaru QGIS spatřila světlo světa. Nové vydání má číslo 3.6 a jak již bývá tradicí, tak i podtitul, v tomto případě Noosa, reflaktuje něco k historii QGISu. Noosa je turistická lokalita na Slunečném pobřeží Austrálie (východní pobřeží), severně od Brisbane, kde se na podzim 2017 konalo setkání vývojářů QGISu. Na […]
The post QGIS 3.6 – nová verze dostupná ke stažení appeared first on GISportal.cz.
The Opener
27.3.2019 14:43 Bentley SystemsPress Coverage
Civil Engineering Surveyor, UK
Read the articleThe Constructioneering Academy: Shining a light on site surveys
27.3.2019 14:41 Bentley SystemsPress Coverage
Civil Engineering Surveyor, UK
Read the articleModelling decentralised energy grid with GIS Digital Twin
27.3.2019 14:39 Bentley SystemsPress Coverage
EE Publishers, Sub Sahara Africa
Read the articleAward for BIM Enabler/Consultant of the Year
27.3.2019 14:36 Bentley SystemsPress Coverage
GeoConnexion, UK
Read the articleMicrosoft's Nancy Li Talks about Mixed Reality in Construction
27.3.2019 14:33 Bentley SystemsPress Coverage
Informed Infrastructure, USA
Read the articleNaviSoC: leveraging Galileo’s dual-frequency precision for the mass market
27.3.2019 14:11 European GNSS Agency
The European GNSS Agency (GSA) had an important message for the recent 2019 Mobile World Congress in Barcelona: When close isn’t enough, use Galileo! The EU-funded NaviSoC project is doing just that, leveraging Galileo's dual-frequency GNSS signal to create a unique, high-precision receiver for mass market applications.
Much has been made of the potential of GNSS to enable new location-based services (LBS) that will profoundly change the lives of mass-market users and businesses. The NaviSoC navigation chip is a very small, multi-frequency GNSS receiver capable of combining Galileo, EGNOS, GPS, GLONASS, BeiDou, and QZSS signals to bring precision positioning to a wide range of devices.
The NaviSoC chip is fully integrated and offers unlimited access to raw GNSS data on any level. It can also be used in combination with an external inertial measurement unit (IMU) to complement its positioning, navigation and timing (PNT) function.
Read this: The GSA and Galileo at MWC Barcelona
"Our NaviSoC GNSS receiver is a semiconductor component meant to be integrated within bigger electronic equipment" said Tomasz Borejko, CEO of Polish company ChipCraft. "It is quite small, at 9mm by 9mm. So if somebody wants to integrate precise navigation in a smartwatch, they can put this chipset inside and they get a very precise position that they can display on a map, for instance."
Galileo first
Borejko's partner is Tomasz Radomski, owner of the INOWATRONIKA company, also based in Poland. Together, the two have created NaviSoC with support from the EU and the Polish government. "We are one of the first in the world to bring out a dual-frequency receiver," Radomski said. "This captures L1/L5 and E1/E5 bands on GPS and Galileo, along with the signals from all other major GNSS constellations."
"This is one of the main differentiators for our chip," said Borejko. "We are using Galileo signals on both frequencies, and that means Galileo is the primary constellation for this chip. Second, we add GPS and then Russian GLONASS and Chinese Beidou. But the chip starts with Galileo as the primary constellation."
"Galileo is our core," said Radomski. "Thanks to this, using our chip, you have better accuracy, below one meter, even down to 10cm, and you have a more robust and reliable position."
Some further details are worth noting; NaviSoC comprises a miniature GNSS receiver equipped with a multi-core 32-bit microcontroller (MPU), and it comes with a software development kit (SDK) that simplifies user application development.
"This feature really separates NaviSoC from other small GNSS receivers, and this can be very interesting for Internet of Things (IoT) applications and even for use in autonomous systems," Radomski said. The NaviSoC team assures us that, to date, no product of this kind has been brought to market. So this chipset offers manufacturers right now the chance to incorporate a genuine high-accuracy GNSS receiver into small, mass-market devices for navigation and positioning.
Ready for action
"We are the second company, after Broadcom, to bring a dual-frequency GNSS chip to market,” said Radomski. "Of course we know that competition is coming, there will be more companies offering dual-frequency, but we are ready and eager to compete with them, with our accuracy and with the lowest price."
And this: Qualcomm launches Snapdragon with dual frequency and 5G
Radomski said the NaviSoC team is now actively looking for customers. "We are in talks with several potential partners right now who want to use our chip. Some are interested in using it to create a module. Others are makers of end devices, end equipment. We are willing to sell to all customers who want our chips, from small companies who might need hundreds or a few thousand chips to bigger companies where we could be talking about millions."
“This kind of product until now has been unachievable on the market," said Borejko. "NaviSoC can be a market enabler for a future GNSS user segment, capable of bringing reliable, high-precision to mass-market users and applications, and taking the automation and autonomy of IoT devices to the next level.”
Galileo Masters winner
Obviously, someone agrees. NaviSoC won the 2018 Galileo Masters – Poland Edition Award, presented last year in Marseilles, in conjunction with the EU Space Week Conference. Borejko said that event went a long way towards stimulating even more interest in the new chipset: "We met many interesting people from the satellite navigation industry in Marseille, with whom we hope to maintain contacts and establish cooperation."
One person who has been following their progress closely is GSA Head of Market Development Fiammetta Diani. In the run-up to the Barcelona event, where the GSA shared a stand with NaviSoC and other EU-funded projects, Diani said: “According to the latest figures, today over 600 million devices – most of them the latest smartphone models – are now Galileo-enabled. Clearly, the time has come to make people aware that Europe’s investment in Galileo is bringing daily benefits to hundreds of millions!” NaviSoC is one such investment that appears to be poised to pay off in a big way.
Media note: This feature can be republished without charge provided the European GNSS Agency (GSA) is acknowledged as the source at the top or the bottom of the story. You must request permission before you use any of the photographs on the site. If you republish, we would be grateful if you could link back to the GSA website (http://www.gsa.europa.eu).
NaviSoC: leveraging Galileo’s dual-frequency precision for the mass market
27.3.2019 14:11 European GNSS AgencyThe European GNSS Agency (GSA) had an important message for the recent 2019 Mobile World Congress in Barcelona: When close isn’t enough, use Galileo! The EU-funded NaviSoC project is doing just that, leveraging Galileo's dual-frequency GNSS signal to create a unique, high-precision receiver for mass market applications.
Much has been made of the potential of GNSS to enable new location-based services (LBS) that will profoundly change the lives of mass-market users and businesses. The NaviSoC navigation chip is a very small, multi-frequency GNSS receiver capable of combining Galileo, EGNOS, GPS, GLONASS, BeiDou, and QZSS signals to bring precision positioning to a wide range of devices.
The NaviSoC chip is fully integrated and offers unlimited access to raw GNSS data on any level. It can also be used in combination with an external inertial measurement unit (IMU) to complement its positioning, navigation and timing (PNT) function.
Read this: The GSA and Galileo at MWC Barcelona
"Our NaviSoC GNSS receiver is a semiconductor component meant to be integrated within bigger electronic equipment" said Tomasz Borejko, CEO of Polish company ChipCraft. "It is quite small, at 9mm by 9mm. So if somebody wants to integrate precise navigation in a smartwatch, they can put this chipset inside and they get a very precise position that they can display on a map, for instance."
Galileo first
Borejko's partner is Tomasz Radomski, owner of the INOWATRONIKA company, also based in Poland. Together, the two have created NaviSoC with support from the EU and the Polish government. "We are one of the first in the world to bring out a dual-frequency receiver," Radomski said. "This captures L1/L5 and E1/E5 bands on GPS and Galileo, along with the signals from all other major GNSS constellations."
"This is one of the main differentiators for our chip," said Borejko. "We are using Galileo signals on both frequencies, and that means Galileo is the primary constellation for this chip. Second, we add GPS and then Russian GLONASS and Chinese Beidou. But the chip starts with Galileo as the primary constellation."
"Galileo is our core," said Radomski. "Thanks to this, using our chip, you have better accuracy, below one meter, even down to 10cm, and you have a more robust and reliable position."
Some further details are worth noting; NaviSoC comprises a miniature GNSS receiver equipped with a multi-core 32-bit microcontroller (MPU), and it comes with a software development kit (SDK) that simplifies user application development.
"This feature really separates NaviSoC from other small GNSS receivers, and this can be very interesting for Internet of Things (IoT) applications and even for use in autonomous systems," Radomski said. The NaviSoC team assures us that, to date, no product of this kind has been brought to market. So this chipset offers manufacturers right now the chance to incorporate a genuine high-accuracy GNSS receiver into small, mass-market devices for navigation and positioning.
Ready for action
"We are the second company, after Broadcom, to bring a dual-frequency GNSS chip to market,” said Radomski. "Of course we know that competition is coming, there will be more companies offering dual-frequency, but we are ready and eager to compete with them, with our accuracy and with the lowest price."
And this: Qualcomm launches Snapdragon with dual frequency and 5G
Radomski said the NaviSoC team is now actively looking for customers. "We are in talks with several potential partners right now who want to use our chip. Some are interested in using it to create a module. Others are makers of end devices, end equipment. We are willing to sell to all customers who want our chips, from small companies who might need hundreds or a few thousand chips to bigger companies where we could be talking about millions."
“This kind of product until now has been unachievable on the market," said Borejko. "NaviSoC can be a market enabler for a future GNSS user segment, capable of bringing reliable, high-precision to mass-market users and applications, and taking the automation and autonomy of IoT devices to the next level.”
Galileo Masters winner
Obviously, someone agrees. NaviSoC won the 2018 Galileo Masters – Poland Edition Award, presented last year in Marseille, in conjunction with the EU Space Week Conference. Borejko said that event went a long way towards stimulating even more interest in the new chipset: "We met many interesting people from the satellite navigation industry in Marseille, with whom we hope to maintain contacts and establish cooperation."
One person who has been following their progress closely is GSA Head of Market Development Fiammetta Diani. In the run-up to the Barcelona event, where the GSA shared a stand with NaviSoC and other EU-funded projects, Diani said: “According to the latest figures, today over 600 million devices – most of them the latest smartphone models – are now Galileo-enabled. Clearly, the time has come to make people aware that Europe’s investment in Galileo is bringing daily benefits to hundreds of millions!” NaviSoC is one such investment that appears to be poised to pay off in a big way.
Media note: This feature can be republished without charge provided the European GNSS Agency (GSA) is acknowledged as the source at the top or the bottom of the story. You must request permission before you use any of the photographs on the site. If you republish, we would be grateful if you could link back to the GSA website (http://www.gsa.europa.eu).
Geograf - Opava
27.3.2019 11:25 ČÚZK - volná místa Zeměměřický úřad vypisuje výběrové řízení na místo Geograf - OpavaGeograf - Opava
27.3.2019 11:25 ČÚZK - předpisy a opatření Zeměměřický úřadvypisuje výběrové řízení na místo
Geograf - Opava
Geograf - Opava
27.3.2019 11:25 Zeměměřický úřad Zeměměřický úřadvypisuje výběrové řízení na místo
Geograf - Opava
Geograf - Opava
27.3.2019 11:25 ČÚZK /Urady/Zememericky-urad/Uredni-deska/Oznameni-a-jina-uredni-sdeleni/Volna-mista/Geograf20190327 – Změny VFK z důvodu nové verze ISKN 8.2.2
27.3.2019 11:21 ČÚZK - Výměnný formát ISKNV souvislosti s instalací nové verze APV 8.2.2 dojde ke změně ve struktuře výměnného formátu ISKN. Nová verze ponese označení 5.4.
- Doplnění nových sloupců CENA_Z_LISTINY, MENA_KOD, PRARES_KOD_OWN a PRARES_KOD_EDIT do záznamů LISTIN.
&BLISTIN;ID N30;TYPLIST_KOD N8;POPIS T2000;OBSAH T1;STRAN N4;DATUM_VYHOTOVENI D;ZHOTOVITEL T60;PORADOVE_CISLO_ZHOTOVITELE T8;ROK_ZHOTOVITELE D;DOPLNENI_ZHOTOVITELE T60;ZKRATKA T10;RIZENI_ID N30;ZMENA_PRAV_VZTAHU T1;DATUM_PRAV_MOCI D;DATUM_VYKONATELNOSTI D;DATUM_HIST_OD D;DATUM_HIST_DO D;CENA_Z_LISTINY N14.2;MENA_KOD T3;PRARES_KOD_OWN N3;PRARES_KOD_EDIT N3
Dále bude provedena oprava nesprávně uváděného datového typu ve sloupci PRIZNAK_KONTEXTU v uvozujících řádcích datových bloků BPOM a BSPOM. Původní hodnota N30 bude v exportovaných souborech nahrazena hodnotou N1.
Předpokládaný termín instalace je 17.5.2019.
Dotazovací služby
27.3.2019 10:48 Geoportál PrahaProstorová data jsou na internetu nejčastěji zpřístupňována prostřednictvím prohlížecích služeb formou mapových kompozic. Potenciál využití prostorových dat je však mnohem širší. V praxi se vyskytuje celá řada úloh, ve kterých je požadováno zjištění existence prvků nebo jejich vlastností na určitém místě povrchu Země, aniž by bylo potřeba současně zobrazovat mapový výstup lokality. Pro řešení těchto úloh využívá hl. m. Praha tzv. dotazovací služby. Jedná se o webové služby na rozhraní REST nebo dle standardu XML-RPC, umožňující vyhledávat informace o de facto libovolných datech datového skladu prostorových dat.
Jak fungují mapové prohlížecí služby
27.3.2019 10:27 Geoportál PrahaProhlížecí služby umožňující zobrazovat geografická data formou on-line mapových výstupů
Vyhledávací služby
27.3.2019 10:27 Geoportál PrahaVyhledávací služby slouží k přístupu k popisným informacím (neboli metadatům) o datových sadách a o prohlížecích službách dostupných v infrastruktuře IPR Praha a hl. m. Praha. Jedná se o webovou službu komunikující na rozhraní ve formátu CSW ve specifikaci dle směrnice INSPIRE.
Receding waters
27.3.2019 9:18 ESA Observing the Earth
While people in Mozambique face the mammoth task of cleaning up after Cyclone Idai, the blue-purple in this image shows where floodwater is retreating
New Wave 2019 (pozvánka)
27.3.2019 8:17 GISportal.cz
Konference New Wave je již tradiční setkání doktorandů a začínajících akademiků, na kterém sdílí své výzkumy a jiné nápady. Po deseti letech, kdy New Wave hostili geografové z pražského Albertova se konference přesouvá do Brna – Geografický ústav, Kotlářská 2. Termín pro přihlášení abstraktů je 31. července!
The post New Wave 2019 (pozvánka) appeared first on GISportal.cz.
Maďarská expertka přednášela o světelném znečištění
27.3.2019 7:46 Katedra geoinformatiky UP OlomoucKatedru v rámci sérií přednášek OGiC navštívila Andrea Pődör z maďarské Óbuda University. Přečtěte si krátký report z její prezentace o světelném znečistění ve městech: https://www.prf.upol.cz/nc/zprava/clanek/madarska-expertka-prednasela-o-svetelnem-znecisteni/
The post Maďarská expertka přednášela o světelném znečištění appeared first on Katedra geoinformatiky.
Pozvánka na přednášku "Wild boar (Sus scrofa) and its impact in Swedish landscapes"
27.3.2019 0:00 Geografický ústav MU
Pozvánka na přednášky Larse Hillströma
27.3.2019 0:00 Geografický ústav MUZveme Vás na přednášku Larse Hillströma na téma "Wild boar (Sus scrofa) and its impact in Swedish landscapes", která se koná ve středu 27. března 2019 v 8:00 hodin na Geografickém ústavu PřF MU (Kotlářská 2, Brno).
Jste také srdečně zváni na další dvě přednášky, se kterými Lars Hillström vystoupí dne 28. března 2019 ve 13:00 a 16:00 hodin v Univerzitním kampusu MU v Brně-Bohunicích.

Omezení provozu Pobočky Břeclav
27.3.2019 0:00 Státní pozemkový úřad Z důvodu plánovaného přerušení dodávky elektřiny bude ve čtvrtek 28. 3. 2019 (8 - 14 hod.) omezen provoz Pobočky Břeclav (KPÚ pro Jihomoravský kraj).Oznámení o omezení provozu na KPÚ pro Pardubický kraj
27.3.2019 0:00 Státní pozemkový úřad Z provozních důvodů bude ve středu 3. 4. 2019 omezen provoz KPÚ pro Pardubický kraj.Elastic Releases Elastic Stack 6.7 with New Maps & Uptime Solutions and the GA of Logs & Infrastructure Solutions, Elasticsearch SQL, and Canvas
26.3.2019 23:28 GISCafe.com Webcasts-Webinars New Elastic Stack features and solutions expand Elastic’s datamanagement capabilities and make it easier for users to consume and
…
Pond5 and DJI Expand Premium Aerial Footage Collection with New Content from Professional Drone Pilots Around the World
26.3.2019 23:28 GISCafe.com Webcasts-Webinars International pilots join US-based and FAA-certified drone filmmakers in the Pond5 marketplace, with a new footage search filter providing customers …Compatibility (with Civil 3D®)
26.3.2019 21:03 Carlson Software I think that Carlson Software is one of the few companies left that intentionally works toward compatibility with other products. Carlson SurvCE still works on most top data collectors on the market today, but did you also know that Carlson office software also supports a large variety of import files from other data collectors and […]Compatibility with Civil 3D®
26.3.2019 21:03 Carlson Software I think that Carlson Software is one of the few companies left that intentionally works toward compatibility with other products. Carlson SurvCE still works on most top data collectors on the market today, but did you also know that Carlson office software also supports a large variety of import files from other data collectors and […]Renew Maintenance Today and Save on Carlson Software
26.3.2019 20:45 Carlson Software MAYSVILLE, Kentucky, U.S.A. (March 2019) — Now is the time for Carlson Software users to renew and save. Applicable for those who never signed up for maintenance or have let their maintenance lapse, Carlson Software office software customers will save when updating their software and sign up for maintenance by September 1st of this year. […]Voda ve vesmíru
26.3.2019 20:35 Český Kosmický PortálVěděli jste, že až osmdesát procent vody na Mezinárodní kosmické stanici je recyklováno? Kosmonauti žijící a pracující 400 km nad naší planetou na to často raději nemyslí, ale voda, kterou pijí, je recyklovaná z potu a jejich kolegy vydechovaného vlhkosti. Následně je sbírána ve formě kondenzátu ze stěn kosmické stanice.
Infraero Pioneers the Use of Digital Twins to Increase the Safety and Efficiency of Brazil’s Airports
26.3.2019 18:18 Bentley SystemsPress Coverage
Microstation Connections, USA
Read the articleBentley Systems is calling for nominations for the Year in Infrastructure 2019 Awards
26.3.2019 18:16 Bentley SystemsPress Coverage
Graphic Speak, USA
Read the articleYYECC Uses BIM and Connected Data Environment to Industrialize Project Delivery
26.3.2019 18:14 Bentley SystemsPress Coverage
Civil + Structural Engineer, USA
Read the articleLast of ARC Industry Forum Interview Notes
26.3.2019 18:12 Bentley SystemsPress Coverage
Manufacturing Connection, USA
Read the articleHS2 - the journey begins
26.3.2019 18:10 Bentley SystemsPress Coverage
Construction Computing, UK
Read the articleS&P CoreLogic Case-Shiller Index Shows Annual Gains Lowest Since 2015
26.3.2019 17:50 GISCafe.com Webcasts-Webinars NEW YORK, March 26, 2019 — (PRNewswire) — S&P Dow Jones Indices today released the latest results for the S&P CoreLogic …Habitat for Humanity-North Central Georgia Recognizes InterDev with Two Awards for Homebuilding Sponsorship
26.3.2019 17:49 GISCafe.com Webcasts-Webinars Since 2017, InterDev has contributed both funding and construction assistance to the effort, and it has renewed its commitment for 2019.ALPHARETTA, …
PlanetObserver Announces Partnership with Airbus Defence and Space to Distribute their Portfolio of Very High Resolution Geospatial Data in Europe
26.3.2019 17:40 GISCafe.com Webcasts-Webinars CLERMONT-FERRAND, France – March 26, 2019 – PlanetObserver, provider of value-added geospatial data for civil and military solutions, …Obsazení funkce odborný pracovník/odborná pracovnice oddělení správy aplikací a GIS odboru informatiky Magistrátu města Jihlavy
26.3.2019 17:06 https://www.jihlava.cz/obsazeni-funkce-odborny-pracovnik-odborna-pracovnice-oddeleni-spravy-aplikaci-a-gis-odboru-informatiky-magistratu-mesta-jihlavy/ds-57060/p1=103388Technology Leader Pontus Noren To Join GeoSpock’s Board As Company Secures Further £2 Million Investment From Parkwalk Advisors
26.3.2019 16:09 GISCafe.com Webcasts-Webinars The unique spatial big data platform that enables companies to access dynamic contextual data visualisation and programmatic analytics appoints new …Technology Leader Pontus Noren To Join GeoSpock’s Board As Company Secures Further £2 Million Investment From Parkwalk Advisors
26.3.2019 16:09 GISCafe.com Webcasts-Webinars The unique spatial big data platform that enables companies to accessdynamic contextual data visualisation and programmatic analytics
…
Mapbox and New Light Technologies Partner on Atlas Managed Service Offering
26.3.2019 16:09 GISCafe.com Webcasts-Webinars Partnership to deliver on-premises solution, Mapbox Atlas, as a managed service offering to federal, state and local governmentsWASHINGTON, March …
Innoviz Technologies Raises $132M in Series C Funding to Accelerate Solid-State LiDAR Production, Expand Team and Further R&D Efforts
26.3.2019 16:09 GISCafe.com Webcasts-Webinars New round brings Innoviz's total funding to $214 million, with a second closing of this round expected in the coming months.ROSH HA'AYIN, Israel, …
Odborný referent / vrchní referent v oddělení obnovy katastrálního operátu č. 1 na Technické sekci
26.3.2019 12:14 ČÚZK - volná místa Katastrální úřad pro Jihomoravský kraj - technická sekce vypisuje výběrové řízení na místo Odborný referent / vrchní referent v oddělení obnovy katastrálního operátu č. 1 na Technické sekciOdborný referent / vrchní referent v oddělení obnovy katastrálního operátu č. 1 na Technické sekci
26.3.2019 12:14 ČÚZK /Urady/Katastralni-urady/Katastralni-urady/Katastralni-urad-pro-Jihomoravsky-kraj/Uredni-deska/Oznameni-a-jina-uredni-sdeleni/Volna-mista/Odborny-referent-vrchni-referent-v-oddeleni-obnoOdborný referent / vrchní referent v oddělení obnovy katastrálního operátu č. 1 na Technické sekci
26.3.2019 12:14 ČÚZK - předpisy a opatření Katastrální úřad pro Jihomoravský kraj - technická sekcevypisuje výběrové řízení na místo
Odborný referent / vrchní referent v oddělení obnovy katastrálního operátu č. 1 na Technické sekci
Vrchní referent / rada v oddělení obnovy katastrálního operátu č. 2 na Technické sekci
26.3.2019 12:10 ČÚZK - předpisy a opatření Katastrální úřad pro Jihomoravský kraj - technická sekcevypisuje výběrové řízení na místo
Vrchní referent / rada v oddělení obnovy katastrálního operátu č. 2 na Technické sekci
Vrchní referent / rada v oddělení obnovy katastrálního operátu č. 2 na Technické sekci
26.3.2019 12:10 ČÚZK /Urady/Katastralni-urady/Katastralni-urady/Katastralni-urad-pro-Jihomoravsky-kraj/Uredni-deska/Oznameni-a-jina-uredni-sdeleni/Volna-mista/Vrchni-referent-rada-v-oddeleni-obnovy-katastralVrchní referent / rada v oddělení obnovy katastrálního operátu č. 2 na Technické sekci
26.3.2019 12:10 ČÚZK - volná místa Katastrální úřad pro Jihomoravský kraj - technická sekce vypisuje výběrové řízení na místo Vrchní referent / rada v oddělení obnovy katastrálního operátu č. 2 na Technické sekciFLAMINGO unveils high-accuracy solution for smartphones
26.3.2019 11:30 European GNSS Agency
For the European GNSS Agency (GSA), the success of Galileo is to be gauged in part in terms of its uptake within the location-based services (LBS) market. The EU-funded FLAMINGO project is unleashing the potential of GNSS, leveraging the dual-frequency Galileo signal for improved LBS performance in the urban environment.
The objectives of the FLAMINGO project are to develop and deliver high accuracy and reliable positioning and navigation services for mass market uptake. The project team is demonstrating the power of Galileo's dual-frequency signal by developing and showcasing ready-to-market applications on both smartphone and IoT devices within major European cities, all while fostering a new community of EGNSS consumers and applications.
William Roberts is Operations Manager at the UK's NSL and FLAMINGO project coordinator. Speaking at the 2019 Mobile World Congress (MWC) in Barcelona, he said, "FLAMINGO is showcasing the near future by enabling and demonstrating high-accuracy positioning and navigation.
"What we are doing is using the GNSS raw measurements that Google are providing at their API [application programming interface] level 24 onwards, to provide high-accuracy services directly onto your standard, standalone smartphone. There are data services behind it, but essentially the user of a smartphone can get down to about 50 cm accuracy."
Read this: LBS user requirements highlighted in GSA special report
Roberts describes the service as a hybrid RTK- and PPP-type solution, using survey techniques within a smartphone. "The limiting factor is really the smartphone itself, the electronics in there. The antenna is buried within the phone, for example, and things like that. So it's not exactly an ideal survey instrument, but still you can get down to several decimetres of accuracy, which opens up a host of fairly interesting markets, from survey to augmented reality-type applications."
The Galileo difference
Roberts said the European satellite navigation system, Galileo, is a key enabler for the FLAMINGO solution, "because it gives you more satellites, which means better availability, but also the new second frequency."
Traditionally, mobile, location-based applications have been powered by single-frequency GNSS receivers operating under stringent battery-power and footprint constraints. With dual-frequency GNSS capabilities, any smartphone can benefit from better accuracy, ionosphere error cancellation, improved tracking and better multipath resistance, so important in an urban setting. Indeed, making a big splash at MWC 2019 were some brand-new, dual-frequency-enabled smartphone models from Chinese manufacturer Xiaomi, the Mi8 and the top-of-the-line Mi9.
"With this dual-frequency capability that we see here at MWC, with the Xiaomi devices, for example, it gives you a far, far better tracking on the L1 band," Roberts said.
Joining Roberts at the FLAMINGO display was Joshua Critchley-Marrows, also of coordinating partner NSL. He said, "I think one of the big differentiators for us is we're targeting mass-market app developers. They can simply add FLAMINGO to their application and they are immediately delivering a more accurate positioning service. This allows things like augmented reality.
And this: EU Space enables an interconnected future
"I'll use an example like a 'laser shooter' game," Critchley-Marrows said. "If you've got some kids pointing their phones at each other and shooting, you need that centimetre accuracy to essentially shoot your friends! Or if you've got a smartphone in the street and you need to identify the cafe that you're trying to get to, you need that below-one-metre accuracy. You might not need ten centimetres or five centimetres, but as long as you've got sub-metre you can probably pinpoint where that shop front is."
"So we're basically enabling a whole new range of apps," said Roberts. "Our FLAMINGO is an app plus an API for developers. So they can simply start FLAMINGO and then start slivering positions, with no knowledge of GNSS.
Widening the community of developers
"One of the things we're going to do at some stage over the next year, it's not confirmed exactly when, is to actually run hackathons, but for the non-GNSS community," Roberts said. "So we want to get people who are app developers who have some form of location-enabled application that they are developing, but they are not GNSS people. That's very important to try and reach out to the wider community and get people here using this. We don't want people to just see GNSS location as a finished product, but instead to use is for more and different kinds of services and solutions."
The FLAMINGO project was on display at MWC in Barcelona thanks to the GSA, which was sharing its space with a select group of excellent EU-supported initiatives using Galileo to bring innovative solutions to the marketplace. "The GSA is all about reducing the time to market and the time to develop a product," Roberts said, "so it gives small companies like ourselves the opportunity to develop new products and new solutions."
"Working within an EU framework has also been great in terms of developing collaborations," Critchley-Marrows said. "We are actually working together with companies across Europe, rather than just trying to compete." Indeed, FLAMINGO involves nine leading European organisations, including five SMEs, all specialised in location technology.
The project represents exactly the kind of innovative, market-oriented initiative that the GSA wants to continue to support and to see succeed, bringing 'the Galileo difference' to the widest possible user market.
Media note: This feature can be republished without charge provided the European GNSS Agency (GSA) is acknowledged as the source at the top or the bottom of the story. You must request permission before you use any of the photographs on the site. If you republish, we would be grateful if you could link back to the GSA website (http://www.gsa.europa.eu).
Postdoctoral Research Scholar Positions at USC – Big Data management and analytics (transportation)
26.3.2019 10:23 The University of Southern California’s Integrated Media Systems Center (USC IMSC), located in Los Angeles, California, invites applicants for a postdoctoral researcher position under the supervision of Prof. Cyrus Shahabi. This will be a fixed-term position for the duration of two years starting May 2019. IMSC blends the unique resources available across the University of […]Postdoctoral Research Scholar Positions at ASU
26.3.2019 10:21 Arizona State University seeks applications for 2 Postdoctoral Research Scholars with interests in community resilience, spatio-temporal analysis, social data analytics, and/or modeling/visualization of complex data start by Fall 2019. Please see the attached description or https://sgsup.asu.edu/employment for more details. Patricia Patricia Solís, PhD Executive Director Knowledge Exchange for Resilience Arizona State University t: 480-965-3767 m: 469-200-9093 email: patricia.solis@asu.eduTwo fully-funded PhD positions in Demography/GIScience at University of St Andrews
26.3.2019 10:20 Dear colleagues, I will be co-supervising two fully-funded PhD projects at the cross of demography/GIScience and am looking for candidates for these positions. Both projects will investigate short- and long-term effects of air pollution and extreme weather events on health and mortality, one in the wider context of UK and the second one focusing on […]WSDP - posun ukončení provozu WSDP verze 2.7
26.3.2019 9:38 ČÚZK - předpisy a opatření Vážení uživatelé webových služeb,oznamujeme, že provoz WSDP verze 2.7 bude ukončen 30.4.2019.
K posunutí termínu došlo s ohledem na chybu v operaci najdiOS ve verzi služeb 2.8.
Děkujeme za pochopení.
WSDP - posun ukončení provozu WSDP verze 2.7
26.3.2019 9:38 Dálkový přístup k údajům KN ČR Vážení uživatelé webových služeb,oznamujeme, že provoz WSDP verze 2.7 bude ukončen 30.4.2019.
K posunutí termínu došlo s ohledem na chybu v operaci najdiOS ve verzi služeb 2.8.
Děkujeme za pochopení.
WSDP - posun ukončení provozu WSDP verze 2.7
26.3.2019 9:38 ČÚZK /Aplikace-DP-do-KN/Aplikace-DP-do-KN/Archiv-DP/252550Úspěch našich studentů na GISáčkovi
26.3.2019 8:25 Katedra geoinformatiky UP OlomoucDne 20. března 2019 proběhla na půdě VŠB-TU Ostrava tradiční soutěž studentů GISáček. Program byl rozdělen na bakalářskou a magisterskou sekci, přičemž v obou měla naše katedra zastoupení. Bakalářské sekce se zúčastnili dva studenti, magisterské pak tři (a jeden absolvent bakaláře). V bakalářské sekci se na prvním místě umístila Tereza Nováková s prací „Termální snímkování […]
The post Úspěch našich studentů na GISáčkovi appeared first on Katedra geoinformatiky.
odborný referent v oddělení aktualizace KN Katastrálního pracoviště Pelhřimov
26.3.2019 8:20 ČÚZK /Urady/Katastralni-urady/Katastralni-urady/Katastralni-urad-pro-Vysocinu/Katastralni-pracoviste/KP-Pelhrimov/O-uradu/Aktuality/odborny-referent-v-oddeleni-aktualizace-KN-Katastrodborný referent v oddělení aktualizace KN Katastrálního pracoviště Pelhřimov
26.3.2019 8:20 ČÚZK - předpisy a opatření Katastrální úřad pro Vysočinu - Katastrální pracoviště Pelhřimov zveřejnil novou aktualitu:Oznámení o vyhlášení výběrového řízení na služební místo odborný referent v oddělení aktualizace KN Katastrálního pracoviště Pelhřimov na Katastrálním úřadu pro Vysočinu
odborný referent v oddělení aktualizace KN Katastrálního pracoviště Pelhřimov
26.3.2019 8:14 ČÚZK - předpisy a opatření Katastrální úřad pro Vysočinu - Katastrální pracoviště Pelhřimovvypisuje výběrové řízení na místo
odborný referent v oddělení aktualizace KN Katastrálního pracoviště Pelhřimov